












الدرس الرابع: التعرف على الوجوه محتويات هذا الدرس: خوارزمية هاار التتالي تطبيق عملي: تحديد الوجوه على صورة تطبيق عملي: تحديد الوجوه على فيديو الدروس الأخرى
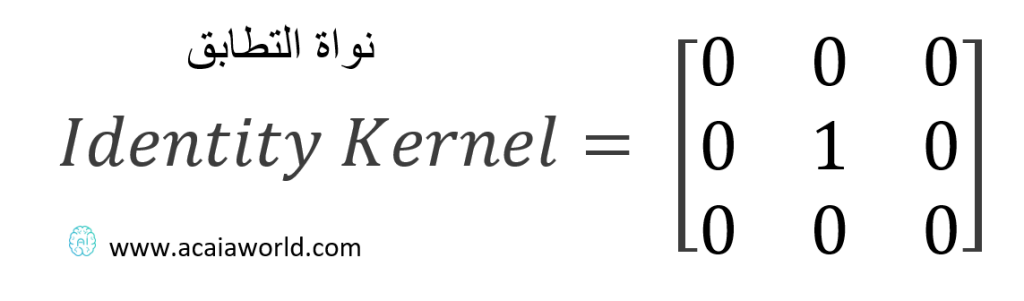
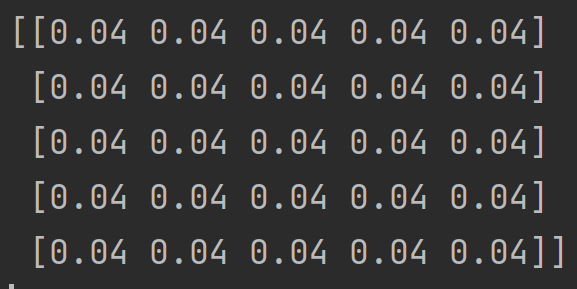
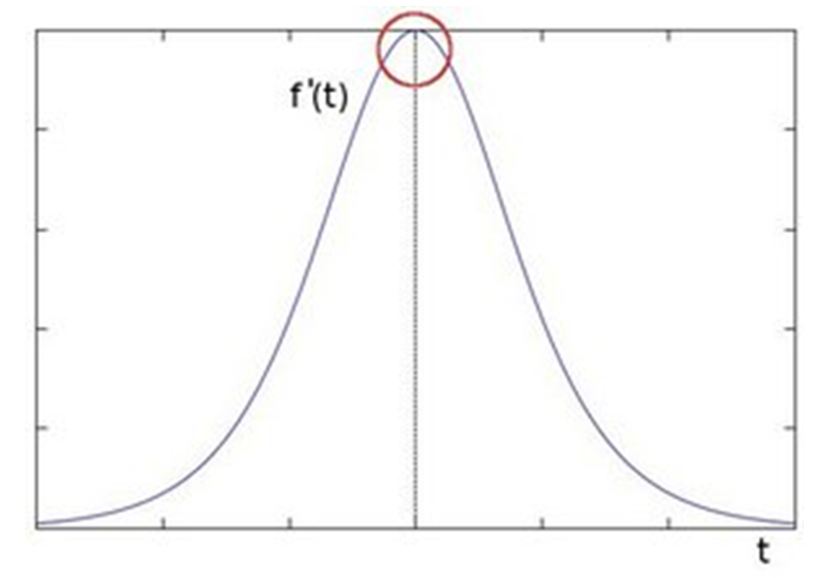
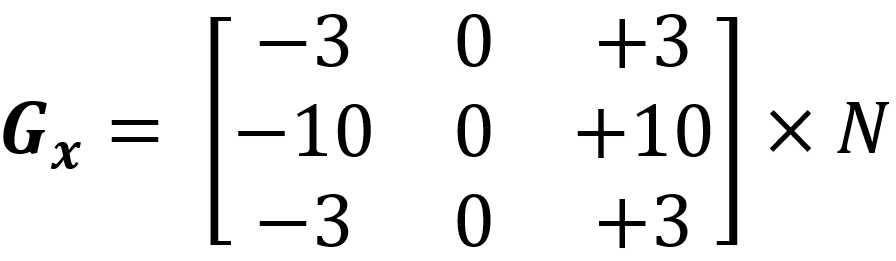
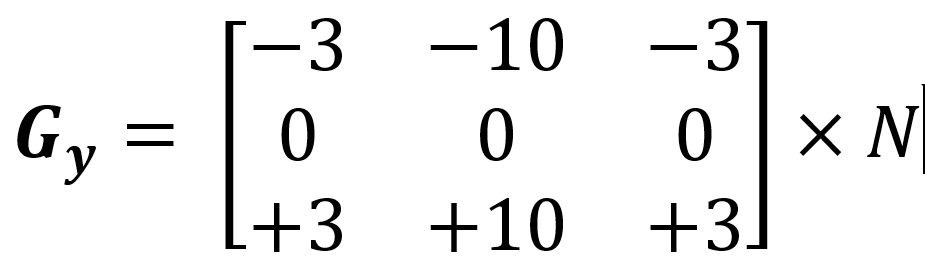
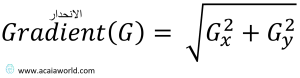
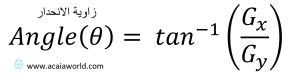
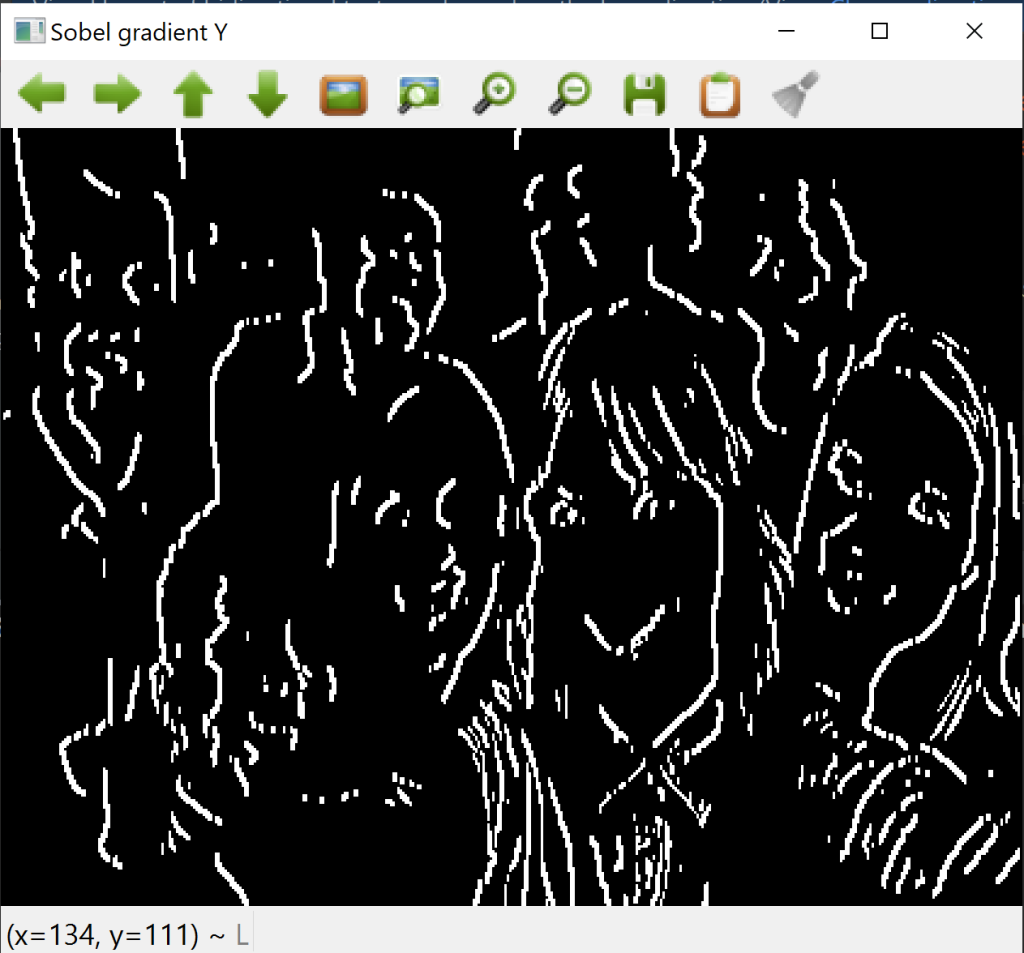
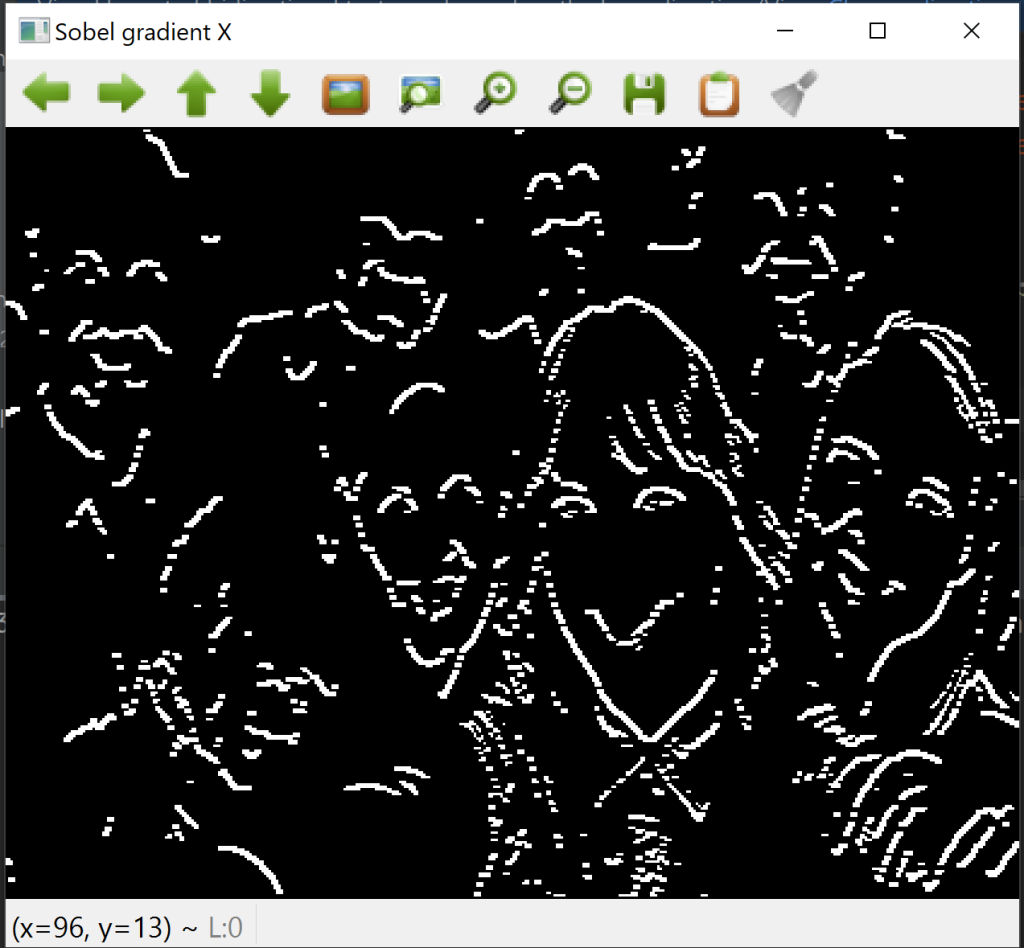
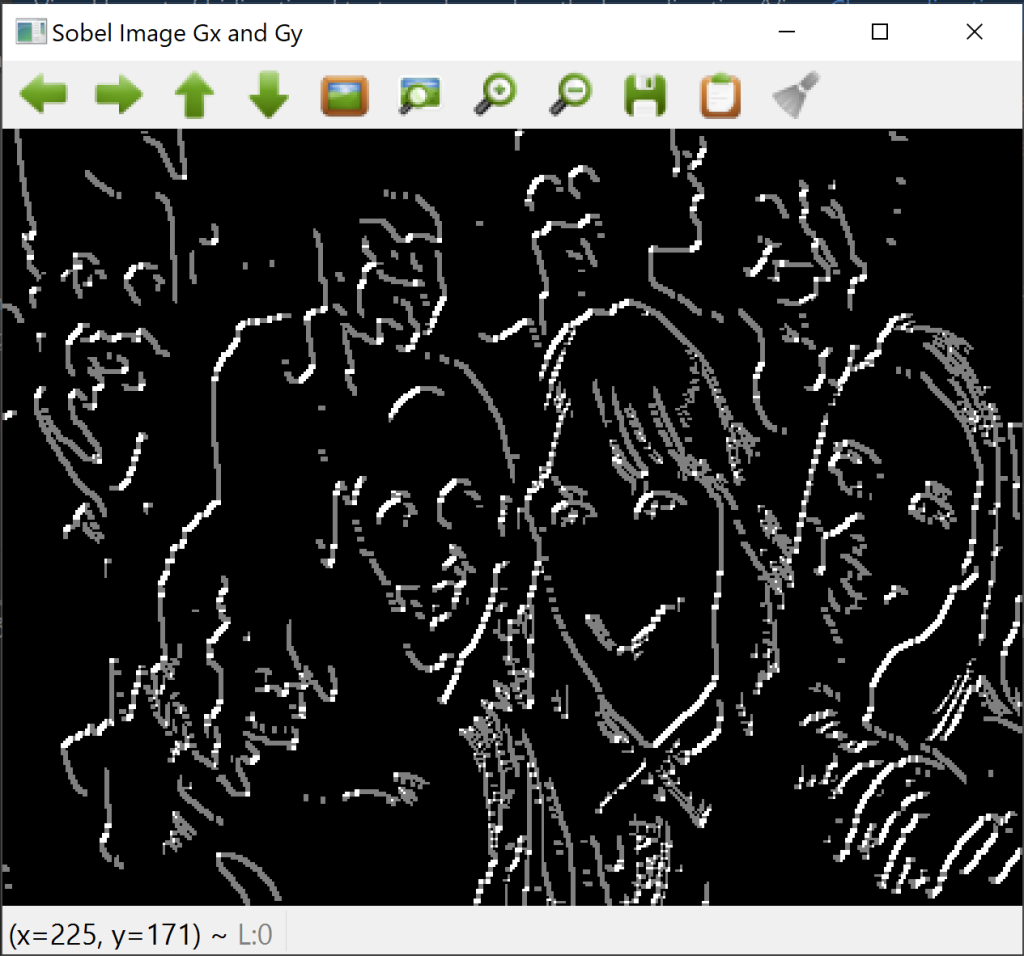
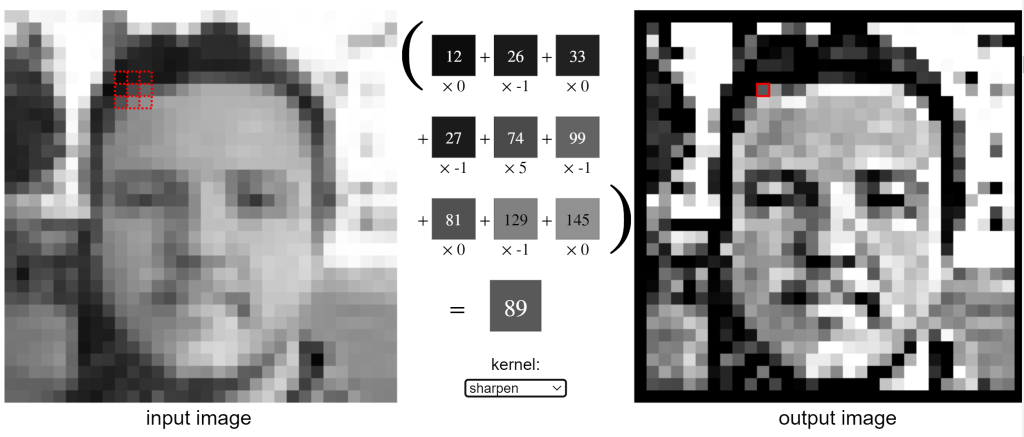
الدرس الثالث : المرشحات والنواة الالتفافية محتويات هذا الدرس: المرشحات النواة الالتفافية عملية الترشيح شحذ الصورة تشويش الصورة تحديد الحواف الدروس الأخرى Author نور عمار
الدرس الثالث : المرشحات والنواة الالتفافية محتويات هذا الدرس: المرشحات النواة الالتفافية عملية الترشيح شحذ الصورة تشويش الصورة تحديد الحواف الدروس الأخرى Author نور عمار
الدرس الثاني: مساحات الألوان في الصورة محتويات هذا الدرس: مساحات ألوان الصورة شرح مبادئ الألوان في الصور تحويل الألوان بين الصور تحويل الصورة الملونة إلى